Os conceitos sobre os robôs industriais
Redação
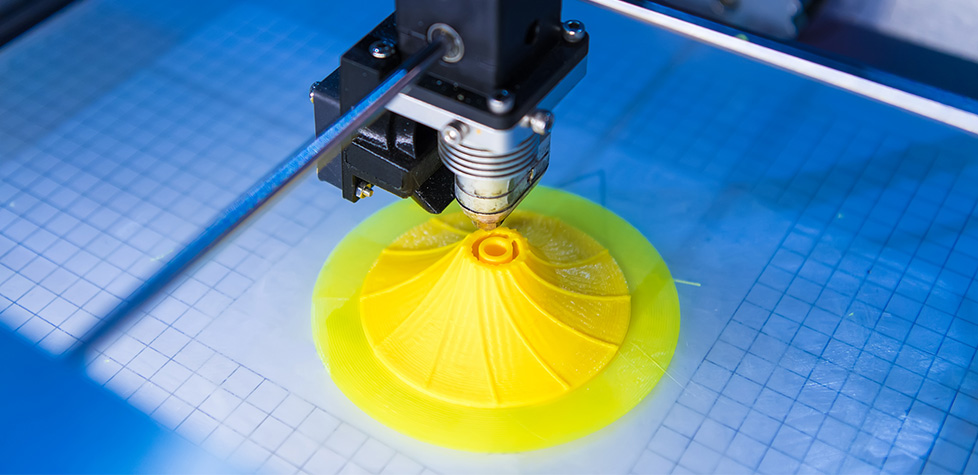
Originalmente, os robôs industriais foram desenvolvidos com o intuito de automatizar as linhas de manufatura gerando altos volumes de produção, diminuição de custos e aumento da qualidade. Agora, eles são encontrados executando tarefas em aplicações de menor escala devido a novas tecnologias e facilidade de implementação. Saiba mais sobre algumas aplicações e suas funcionalidades.

Cristiano Bertulucci Silveira -
Os robôs industriais compõem a grande indústria da robótica que muda rapidamente e está em constante evolução. Sabemos pela história que desde a criação das máquinas a vapor, a tecnologia vem mudando drasticamente, principalmente nas últimas décadas, assim como o volume e a variedade de necessidades impostas pelos diferentes processos de manufatura. Para aqueles que são novos na indústria e não conhecem os robôs industriais, pode parecer difícil encontrar um ponto de partida.
Uma ampla visão geral dos tipos e benefícios da automação pode fornecer uma compreensão básica da tecnologia de robótica industrial e da crescente indústria de robótica. Existem muitos tipos diferentes de aplicações de automação que os robôs estão preparados para manipular.
Frequentemente, os robôs são projetados ou integrados com uma tarefa específica em mente e adaptados para atender às necessidades exclusivas dessa tarefa. Algumas formas comuns de automação com eles incluem: soldagem, parafusamento, manipulação e embalagem de material, pegar e colocar, distribuição, corte e inspeção não des...
Artigo atualizado em 08/10/2024 04:45.